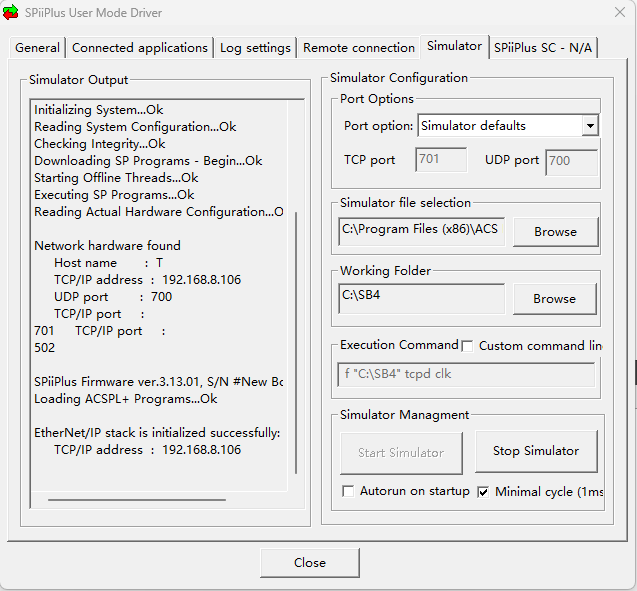
- ACS仿真器
- Demo程序1
QT = core
CONFIG += c++17 cmdline
# You can make your code fail to compile if it uses deprecated APIs.
# In order to do so, uncomment the following line.
#DEFINES += QT_DISABLE_DEPRECATED_BEFORE=0x060000 # disables all the APIs deprecated before Qt 6.0.0
SOURCES += \
main.cpp
# Default rules for deployment.
qnx: target.path = /tmp/$${TARGET}/bin
else: unix:!android: target.path = /opt/$${TARGET}/bin
!isEmpty(target.path): INSTALLS += target
win32:CONFIG(release, debug|release): LIBS += -L$$PWD/SDK/ -lACSCL_x64
INCLUDEPATH += $$PWD/SDK
DEPENDPATH += $$PWD/SDK
LIBS +=-L$$PWD/SDK -lACSCL_x64
win32:!win32-g++:CONFIG(release, debug|release): PRE_TARGETDEPS += $$PWD/SDK/ACSCL_x64.lib
#include <conio.h>
#include <stdio.h>
#include "windows.h"
//这里是安装acs套件程序存放acsc.h的路径
//"D:\\Program Files (x86)\\ACS Motion Control\\SPiiPlus ADK Suite v3.13.01\\ACSC\\C_CPP\\acsc.h"
//比如把这个头文件与库文件ACSCL_x64.LIB,ACSCL_x86.LIB都拷贝到本工程的一个新建文件夹SDK下面
#include "SDK\acsc.h"
HANDLE hComm;// communication handle
void ErrorsHandler(const char* ErrorMessage, BOOL fCloseComm)
{
printf (ErrorMessage);
printf ("press any key to exit.\n");
if (fCloseComm) acsc_CloseComm(hComm);
{
_getch();
};
}
int main(int argc, char *argv[])
{
double FPOS;
// ACSPL+ program which we download to controller's buffer
// The program performs a reciprocated motion from position 0 to 4000
// and then back
//char* prog = "enable 0\r\nptp 0, 4000 \r\nptp 0, 0 \r\n";
char* prog = "enable 0\r\nSt: \r\nptp 0, 4000 \r\nptp 0, 0 \r\ngoto St \r\n";
printf ("ACS Motion Control Copyright (C) 2011. All Rights \
Reserved.\n");
printf ("Application executes reciprocated point-to-point motion\n");
/*****************************************************************/
// Open communication with simulator
printf ("Application opens communication with the simulator, \
downloads\n");
printf ("program to controller's and executes it using SPiiPlus C Library \
functions\n\n");
printf ("Wait for opening of communication with the simulator...\n");
hComm = acsc_OpenCommSimulator();
if (hComm == ACSC_INVALID)
{
ErrorsHandler("error while opening communication.\n", FALSE);
return -1;
}
printf ("Communication with the simulator was established \
successfully!\n");
/*****************************************************************/
/********************************************************************
// Example of opening communication with the controller via COM1
printf ("Application opens communication with the controller via \
COM1, downloads\n");
printf ("program to the controller and executes it using SPiiPlus C \
Library functions\n\n");
printf ("Wait for opening of communication with the \
controller...\n");
hComm = acsc_OpenCommSerial(1, 115200);
if (hComm == ACSC_INVALID)
{
ErrorsHandler("error while opening communication.\n", FALSE);
return -1;
}
printf ("Communication with the controller was established \
successfully!\n");
/*****************************************************************/
/********************************************************************
// Example of opening communication with the controller via COM1
printf ("Application opens communication with the controller via \
COM1, downloads\n");
printf ("program to the controller and executes it using SPiiPlus C \
Library functions\n\n");
printf ("Wait for opening of communication with the \
controller...\n");
hComm = acsc_OpenCommSerial(1, 115200);
if (hComm == ACSC_INVALID)
{
ErrorsHandler("error while opening communication.\n", FALSE);
return -1;
}
printf ("Communication with the controller was established \
successfully!\n");
/*******************************************************************/
/********************************************************************
// Example of opening communication with controller via Ethernet
printf ("Application opens communication with the controller via \
Ethernet, downloads\n");
printf ("program to the controller and executes it using SPiiPlus C \
Library functions\n\n");
printf ("Wait for opening of communication with the \
controller...\n");
// 10.0.0.100 - default IP address of the controller
// for the point-to-point connection to the controller
hComm = acsc_OpenCommEthernet("10.0.0.100", ACSC_SOCKET_DGRAM_PORT);
// for the connection to the controller via local network or Internet
//hComm = acsc_OpenCommEthernet("10.0.0.100", ACSC_SOCKET_STREAM_PORT);
if (hComm == ACSC_INVALID)
{
ErrorsHandler("error while opening communication.\n", FALSE);
return -1;
}
printf ("Communication with the controller was established \
successfully!\n");
/*******************************************************************/
/********************************************************************
// Open communication with the controller via PCI bus
// (for the SPiiPlus PCI-8 series only)
printf ("Application opens communication with the controller and\n");
printf ("sends some commands to the controller using SPiiPlus C Library
\
functions\n\n");
printf ("Wait for opening of communication with the \
controller...\n");
hComm = acsc_OpenCommPCI(ACSC_NONE);
if (hComm == ACSC_INVALID)
{
ErrorsHandler("error while opening communication.\n", FALSE);
return -1;
}
printf ("Communication with the controller was established \
successfully!\n");
/*****************************************************************/
printf ("Press any key to run motion.\n");
printf ("Then press any key to exit.\n");
_getch();
// Stop a program in the buffer 0
if (!acsc_StopBuffer(hComm, 0, NULL))
{
ErrorsHandler("stop program error.\n", TRUE);
return -1;
}
// Download the new program to the controller's buffer
if (!acsc_LoadBuffer(hComm, 0, prog, strlen(prog), NULL))
{
ErrorsHandler("downloading program error.\n", TRUE);
return -1;
}
printf ("Program downloaded\n");
// Execute the program in the buffer 0
if (!acsc_RunBuffer(hComm, 0, NULL, NULL))
{
ErrorsHandler("run program error.\n", TRUE);
return -1;
}
printf ("Motion is in progress...\n");
printf ("Feedback position:\n");
while (!_kbhit())
{
// read the feedback position of axis 0
if (acsc_GetFPosition(hComm, ACSC_AXIS_0, &FPOS, NULL))
{
printf ("%f\r", FPOS);
}
Sleep(500);
}
// Stop the program in the buffer 0
if (!acsc_StopBuffer(hComm, 0, NULL))
{
ErrorsHandler("stop program error.\n", TRUE);
return -1;
}
// Close the communication
acsc_CloseComm(hComm);
return 0;
}
- Demo程序2
QT = core
CONFIG += c++17 cmdline
# You can make your code fail to compile if it uses deprecated APIs.
# In order to do so, uncomment the following line.
#DEFINES += QT_DISABLE_DEPRECATED_BEFORE=0x060000 # disables all the APIs deprecated before Qt 6.0.0
SOURCES += \
main.cpp
# Default rules for deployment.
qnx: target.path = /tmp/$${TARGET}/bin
else: unix:!android: target.path = /opt/$${TARGET}/bin
!isEmpty(target.path): INSTALLS += target
win32:CONFIG(release, debug|release): LIBS += -L$$PWD/SDK/ -lACSCL_x64
INCLUDEPATH += $$PWD/SDK
DEPENDPATH += $$PWD/SDK
LIBS +=-L$$PWD/SDK -lACSCL_x64
win32:!win32-g++:CONFIG(release, debug|release): PRE_TARGETDEPS += $$PWD/SDK/ACSCL_x64.lib
#include <conio.h>
#include <stdio.h>
#include "windows.h"
//这里是安装acs套件程序存放acsc.h的路径
//"D:\\Program Files (x86)\\ACS Motion Control\\SPiiPlus ADK Suite v3.13.01\\ACSC\\C_CPP\\acsc.h"
//比如把这个头文件与库文件ACSCL_x64.LIB,ACSCL_x86.LIB都拷贝到本工程的一个新建文件夹SDK下面
#include "SDK\acsc.h"
HANDLE hComm;// communication handle
void ErrorsHandler(const char* ErrorMessage, BOOL fCloseComm)
{
printf (ErrorMessage);
printf ("press any key to exit.\n");
if (fCloseComm) acsc_CloseComm(hComm);
{
_getch();
};
}
int main(int argc, char *argv[])
{
double FPOS;
int State;
printf ("ACS Motion Control. Copyright (C) 2011. All Rights \
Reserved.\n");
printf ("Application executes reciprocated point-to-point motion\n");
/*****************************************************************/
// Open communication with the simulator
printf ("Application opens communication with the simulator and\n");
printf ("sends some commands to the simulator using SPiiPlus C Library \
functions\n\n");
printf ("Wait for opening of communication with the simulator...\n");
hComm = acsc_OpenCommSimulator();
if (hComm == ACSC_INVALID)
{
ErrorsHandler("error while opening communication.\n", FALSE);
return -1;
}
printf ("Communication with the simulator was established \
successfully!\n");
/*****************************************************************/
/******************************************************************
// Example of opening communication with the controller via COM1
printf ("Application opens communication with the controller via \
serial link and\n");
printf ("sends some commands to the controller using SPiiPlus C Library
\functions\n\n");
printf ("Wait for opening of communication with the \
controller...\n");
hComm = acsc_OpenCommSerial(1, 115200);
if (hComm == ACSC_INVALID)
{
ErrorsHandler("error while opening communication.\n", FALSE);
return -1;
}
printf ("Communication with the controller was established \
successfully!\n");
/*****************************************************************/
/******************************************************************
// Example of opening communication with the controller via Ethernet
printf ("Application opens communication with the controller via \
ethernet and\n");
printf ("sends some commands to the controller using SPiiPlus C Library
\functions\n\n");
printf ("Wait for opening of communication with the \
controller...\n");
// 10.0.0.100 - default IP address of the controller
// for the point to point connection to the controller
hComm = acsc_OpenCommEthernet("10.0.0.100", ACSC_SOCKET_DGRAM_PORT);
// for the connection to the controller via local network or Internet
// hComm = acsc_OpenCommEthernet("10.0.0.100", ACSC_SOCKET_STREAM_PORT);
if (hComm == ACSC_INVALID)
{
ErrorsHandler("error while opening communication.\n", FALSE);
return -1;
}
printf ("Communication with the controller was established \
successfully!\n");
/*******************************************************************/
/********************************************************************
// Open communication with the controller via PCI bus
// (for the SPiiPlus PCI-8 series only)
printf ("Application opens communication with the controller and\n");
printf ("sends some commands to the controller using SPiiPlus C Library \
functions\n\n");
printf ("Wait for opening of communication with the \
controller...\n");
hComm = acsc_OpenCommPCI(ACSC_NONE);
if (hComm == ACSC_INVALID)
{
ErrorsHandler("error while opening communication.\n", FALSE);
return -1;
}
printf ("Communication with the controller was established \
successfully!\n");
/*****************************************************************/
printf ("Press any key to run motion.\n");
printf ("Then press any key to exit.\n");
_getch();
// Enable the motor 0
if (!acsc_Enable(hComm, ACSC_AXIS_0, NULL))
{
ErrorsHandler("transaction error.\n", TRUE);
return -1;
}
printf ("Motor enabled\n");
while (!_kbhit())
{
// execute point-to-point motion to position 4000
if (!acsc_ToPoint(hComm, 0, ACSC_AXIS_0, 4000, NULL))
{
ErrorsHandler("PTP motion error.\n", TRUE);
return -1;
}
printf ("Moving to the position 4000...\n");
// execute backward point-to-point motion to position 0
if (!acsc_ToPoint(hComm, 0, ACSC_AXIS_0, 0, NULL))
{
ErrorsHandler("PTP motion error.\n", TRUE);
return -1;
}
printf ("Moving back to the position 0...\n");
// Check if both of motions finished
do
{
if (acsc_GetFPosition(hComm, ACSC_AXIS_0, &FPOS, NULL))
{
printf ("%f\r", FPOS);
}
// Read the motor 0 state. Fifth bit shows motion
// process
if (!acsc_GetMotorState(hComm, ACSC_AXIS_0, &State,NULL))
{
ErrorsHandler("get motor state error.\n", TRUE);
return -1;
}
Sleep(500);
} while (State & ACSC_MST_MOVE);
}
acsc_CloseComm(hComm);
return 0;
}

