
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
船舶回转和Z形操舵仿真是船舶设计和操作中的重要领域。通过仿真技术,船舶设计师和操作人员可以更好地理解船舶在不同环境和操作条件下的性能和行为。本文将介绍船舶回转和Z形操舵仿真的基本概念和应用,以及目前的研究和发展趋势。
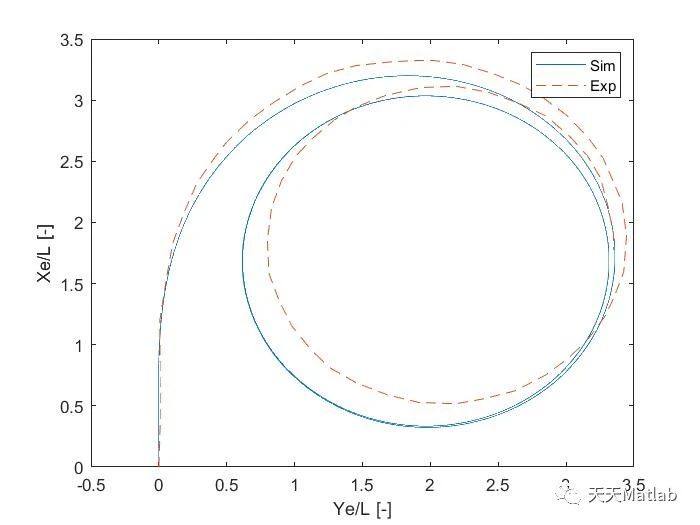
船舶回转是指船舶绕其垂直轴旋转的运动。这种运动对于船舶的操纵和操作至关重要,尤其是在狭窄的水域或需要进行精确停靠的情况下。船舶回转的仿真可以帮助设计师和操作人员了解船舶在不同操纵条件下的回转性能,以及如何通过操舵和推进系统来控制船舶的回转运动。
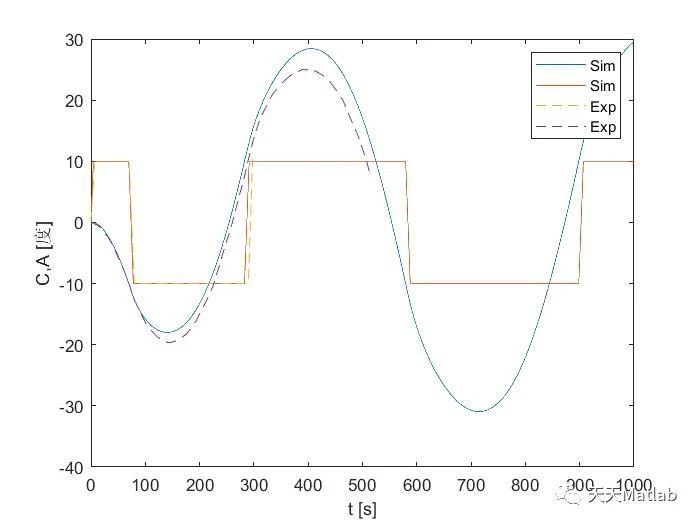
Z形操舵是一种特殊的船舶操舵方式,通过不同程度的舵角和推进器的组合来实现船舶的横向移动和转向。Z形操舵的仿真可以帮助设计师和操作人员了解船舶在不同操舵和推进组合下的横向运动性能,以及如何通过调整舵角和推进器来实现船舶的精确操纵和停靠。
船舶回转和Z形操舵仿真的应用范围非常广泛,涉及船舶设计、航行操作、港口作业等多个领域。通过仿真技术,设计师可以在设计阶段评估不同船舶设计参数对船舶回转和横向运动性能的影响,从而优化船舶设计。操作人员可以通过仿真技术进行不同操纵条件下的训练和评估,提高船舶的操纵和操作技能。
目前,船舶回转和Z形操舵仿真技术正在不断发展和完善。随着计算机硬件和软件性能的提升,仿真模型的精度和复杂度不断提高,仿真结果的准确性和可靠性也在不断提升。同时,虚拟现实技术的应用也为船舶回转和Z形操舵仿真带来了新的发展机遇,通过虚拟现实技术,操作人员可以在真实的船舶操纵环境中进行仿真训练,提高操纵技能。
总之,船舶回转和Z形操舵仿真是船舶设计和操作中不可或缺的重要工具,通过仿真技术,设计师和操作人员可以更好地理解船舶的性能和行为,优化船舶设计和操作,提高船舶的安全性和效率。随着技术的不断发展和完善,船舶回转和Z形操舵仿真技术将在船舶行业发挥越来越重要的作用。
📣 部分代码
%% 定义船舶主尺度变量
Loa =325.5000;
Lpp =320;
B =58;
T =20.8000;
Cb =0.8100;
Xg =11.1300;
Iz =2.00*10^12;
Vs =7.9732;
m=Lpp*B*T*Cb*1.025*1000*1.006;
u=Vs;
L=Lpp;
q=1025;
%% 给船舶运动状态赋初值
du=0;
dt=0.01;%时间步进为0.01s
v=0;
r=0;
u1=0;
v1=0;
r1=0;
a=0;%定义初值舵角
c=0;%定义初始首向角
C=zeros(1,000000);%定义首向角矩阵
idx=0;
A=zeros(1,000000);%定义舵角矩阵
T=zeros(1,000000);%定义时间矩阵
t=0;%赋予时间初值
i=0;%转舵速度控制参数
j=0;%步进参数
%% 循环迭代计算各个时刻所需数值⛳️ 运行结果
🔗 参考文献
本程序参考以下中文EI期刊,程序注释清晰,干货满满。
[1]朴在吉.POD推进船舶操纵数学模型与智能控制[D].大连海事大学,2016.