
原理
主元分析法PCA学习笔记
点云法向量与点云平面拟合的关系(PCA)
Estimating Surface Normals in a PointCloud
利用PCA计算点云的法线
3D点云法向量估计(最小二乘拟合平面)
利用PCA求点云的法向量
pca_demo.m
clc
clear
close all
n=50;
z=peaks(n);
x=1:n;y=1:n;
[x,y]=meshgrid(x,y);
P=[x(:),y(:),z(:)];
%读入屋顶点云
% P=load('building_Example2.txt');
% P=P(:,1:1:3);
%读入Building1.txt
% P=load('point_w.txt');
% P=P(:,1:1:3);
P=P';%P=3x2500
k=8;
[pn,pw] = pca(P, k);
pp = P+3.*pn;%pn为法向量,pw为评价曲率的一个参数
%求取曲率最大的500个点
P_=P';%P_ 是2500x3
[pw_,indice]=sort(pw);
indice=indice';
%找出曲率最大(或最小)的几个点,验证
% pw_first=indice(size(indice,1)-100:1:size(indice,1),:);%曲率最大值排前1000的点
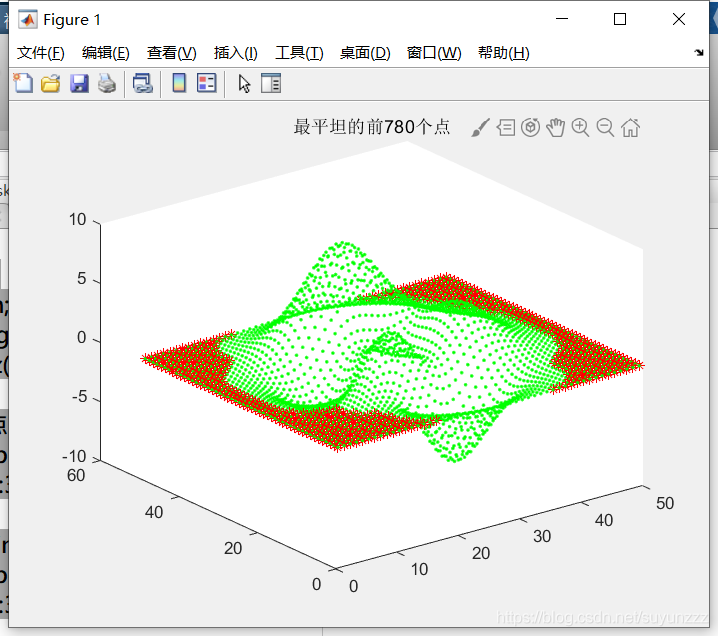
pw_first=indice(1:1:700,:);%曲率最小值(最平坦)排前1000的点
for i=1:size(pw_first)
Point_pw(i,1)=P_(pw_first(i),1);
Point_pw(i,2)=P_(pw_first(i),2);
Point_pw(i,3)=P_(pw_first(i),3);%Point_pw为曲率的前500个点
end
figure;
% scatter3( P(1,:)',P(2,:)',P(3,:)','.');
plot3(P(1,:)',P(2,:)',P(3,:)','g.');
hold on
plot3(Point_pw(:,1),Point_pw(:,2),Point_pw(:,3),'r*');
title("最平坦的前780个点");
% 使用matlab工具箱计算的法向量
figure(2);
P=P';
pt=pointCloud(P);
pcshow(pt);
hold on;
normals=pcnormals(pt,8);
u = normals(1:5:end,1);
v = normals(1:5:end,2);
w = normals(1:5:end,3);
x=P(1:5:end,1);
y=P(1:5:end,2);
z=P(1:5:end,3);
title('Matlab点云工具箱计算的 Normals of Point Cloud')
hold on
quiver3(x, y, z, u, v, w);
view(-37.5,45);
hold off
%使用pca计算的法向量
figure(3)
pcshow(pt);
hold on;
pn=pn';%对pn进行转置
u_p = pn(1:5:end,1);
v_p = pn(1:5:end,2);
w_p = pn(1:5:end,3);
title('PCA计算的 Normals of Point Cloud')
hold on
quiver3(x, y, z, u_p, v_p, w_p);
view(-37.5,45);
hold offpca.m
% PCA主元分析法求法向量
% 输入:
% p:3*n的数值矩阵
% k:k近邻参数
% neighbors = transpose(knnsearch(transpose(p), transpose(p), 'k', k+1));
% neighbors一般可缺省。若之前做过k邻域求取操作也可直接调用,提高运算效率
% 输出
% n:法矢,已规定方向由邻域拟合出的平面指向查询点
% w:用于评估曲率的参数,详见:Mark P,et al. Multi-scale Feature Extraction on Point-Sampled Surfaces[J]. Computer Graphics Forum, 2010, 22(3): 281-289.
function [n,w] = pca(p, k, neighbors)%p为输入的点云
if nargin < 2
error('no bandwidth specified')
end
if nargin < 3
neighbors = transpose(knnsearch(transpose(p), transpose(p), 'k', k+1));%neighbor为一个索引矩阵,第一行代表第几个点,后8行代表K近邻的点。记录每个点及其周围的8个点
end
m = size(p,2);%返回第2维的维度
n = zeros(3,m); %存放法线的矩阵
w = zeros(1,m);
for i = 1:m
x = p(:,neighbors(2:end, i));%x为8个邻域点 ,3x8的矩阵
p_bar=mean(x,2);%每一行求均值(一共三行)
% P = (x - repmat(p_bar,1,k)) * transpose(x - repmat(p_bar,1,k));%中心化样本矩阵,再计算协方差矩阵
% P = 1/(k) * (x - repmat(p_bar,1,k)) * transpose(x - repmat(p_bar,1,k)); %邻域协方差矩阵P
P=(x - repmat(p_bar,1,k)) * transpose(x - repmat(p_bar,1,k))./(size(x,2)-1);
[V,D] = eig(P);%求P的特征值、特征向量。 D是对应的特征值对角矩阵,V是特征向量(因为协方差矩阵为实对称矩阵,故特征向量为单位正交向量)
[d0, idx] = min(diag(D)); %d0为最小特征值 idx为特征值的列数索引。diag():创建对角矩阵或获取矩阵的对角元素
n(:,i) = V(:,idx); % 最小特征值对应的特征向量为法矢,即法向量
%规定法矢方向指向
flag = p(:,i) - p_bar;%由近邻点的平均点指向对应点的向量
if dot(n(:,i),flag)<0%如果这个向量与法向量的数量积为负数(反向)
n(:,i)=-n(:,i);%法向量取反向
end
if nargout > 1
w(1,i)=abs(d0)./sum(abs(diag(D)));%最小特征值的绝对值在协方差矩阵特征值绝对值的总和中占的比重
end
end效果
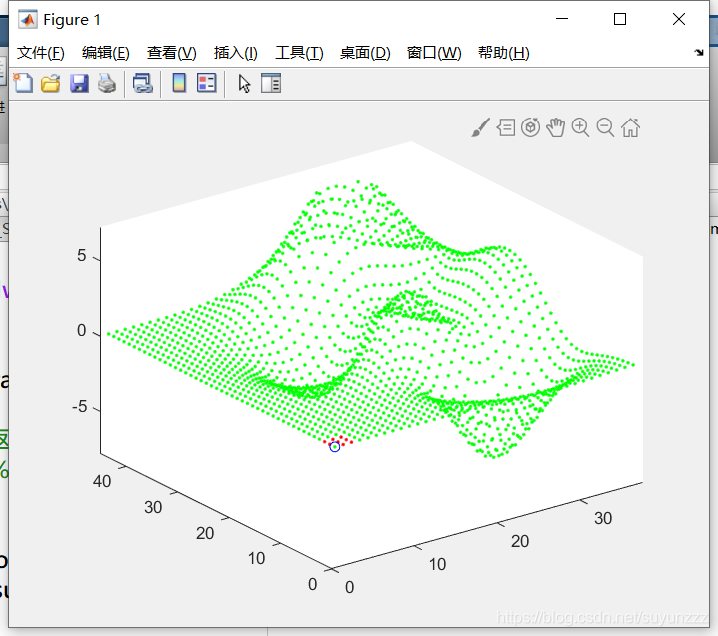
在pca.m中是用到了matlab内置的K-NN查找K近邻点
近邻点查找效果如下,这里K取8,
使用手写的PCA计算出的法向量和matlab点云处理工具箱计算的法向量的效果对比如下,
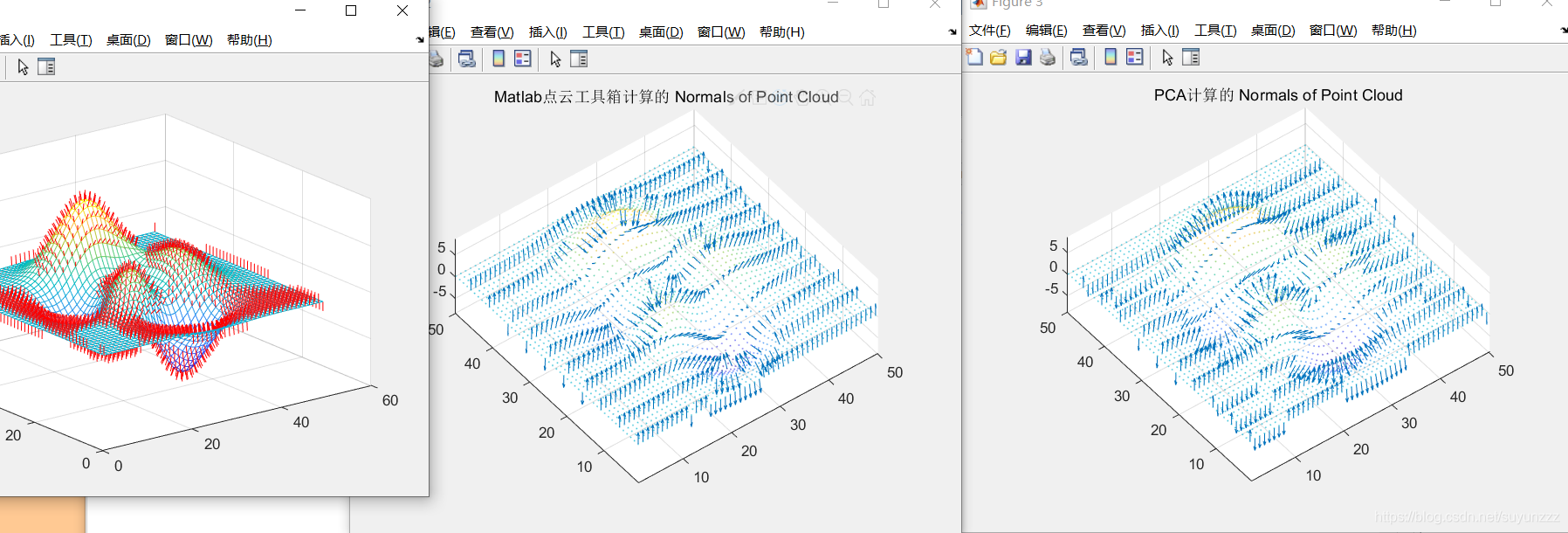
可以看到,基本上是一样的。