
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
🔥 内容介绍
引言: 齿轮是机械传动系统中不可或缺的组成部分,其设计和性能对整个机械系统的运行稳定性和效率起着至关重要的作用。然而,在实际应用中,齿轮箱的振动问题常常成为制约其性能和寿命的重要因素。因此,对齿轮箱振动数据进行分析和处理,成为了齿轮设计和故障诊断的重要环节。
本文将介绍一种齿轮箱振动数据分析的算法流程,通过该流程可以有效地提取和分析齿轮箱振动数据中的有用信息,为齿轮设计和故障诊断提供有力的支持。
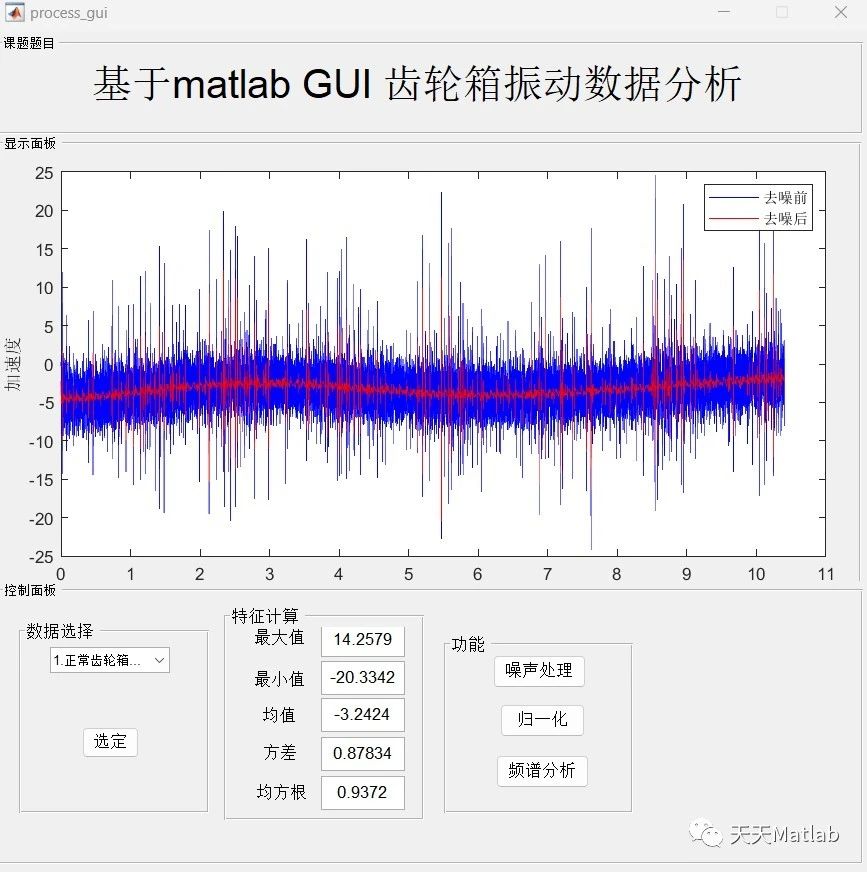
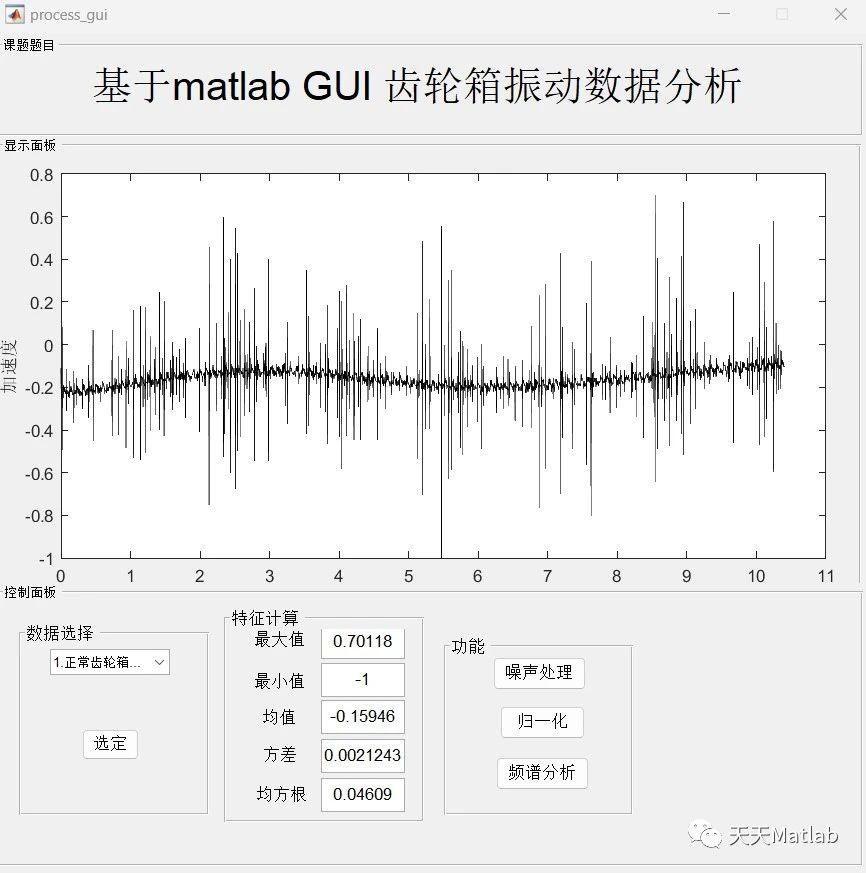
一、数据采集与预处理 齿轮箱振动数据的采集通常通过加速度传感器或振动传感器进行,可以得到齿轮箱在不同工况下的振动信号。然而,由于传感器的噪声和采样误差等因素的存在,采集到的原始数据往往包含大量的噪声和无用信息。因此,在进行振动数据分析之前,需要对原始数据进行预处理,包括滤波、降噪和数据对齐等步骤,以提高数据的质量和可用性。
二、特征提取与选择 在齿轮箱振动数据中,存在着大量的振动特征,如频率、振幅、相位等。这些特征可以反映齿轮箱的运行状态和存在的故障。因此,通过对振动数据进行特征提取,可以有效地提取和选择与齿轮箱运行状态和故障相关的特征,为后续的故障诊断和预测提供依据。
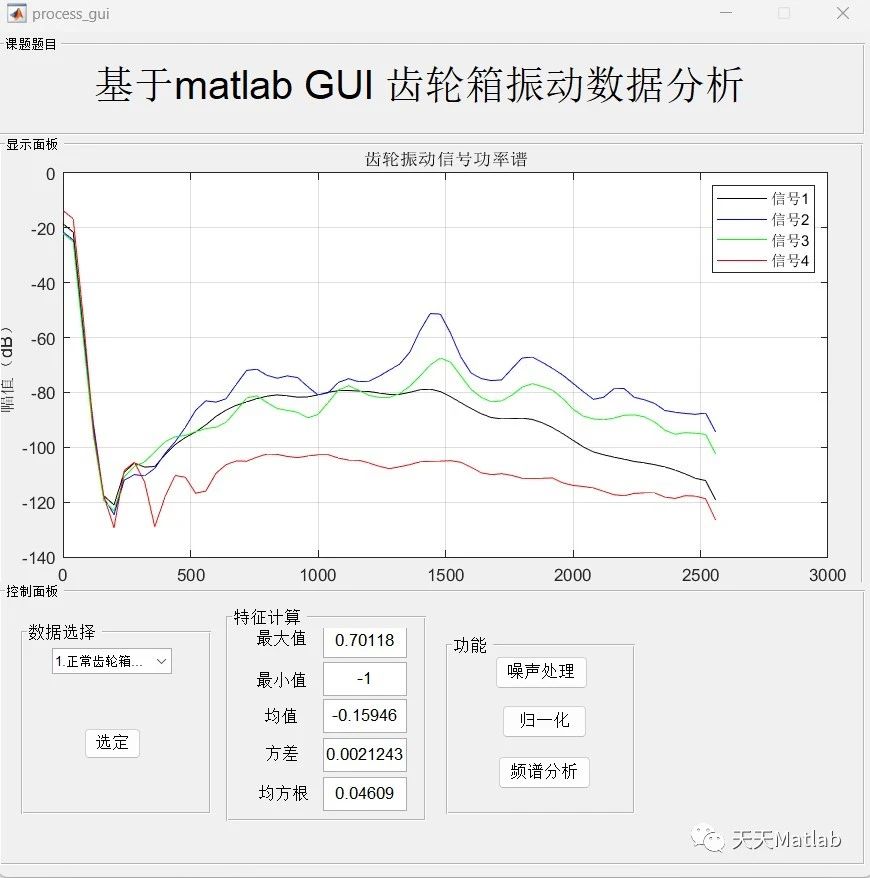
常用的特征提取方法包括时域特征提取和频域特征提取。时域特征提取主要通过计算振动信号的均值、方差、峰值等统计量来反映振动信号的时域特征。频域特征提取则通过将振动信号进行傅里叶变换,将其转换到频域,进而提取频域特征,如频谱图、功率谱等。
三、故障诊断与预测 通过对齿轮箱振动数据进行特征提取,可以得到与齿轮箱运行状态和故障相关的特征。接下来,可以利用这些特征进行故障诊断和预测。常用的方法包括模式识别、机器学习和人工智能等。
模式识别是一种基于样本数据的分类方法,通过建立齿轮箱振动数据与不同故障模式之间的对应关系,从而实现对故障模式的识别和分类。机器学习则通过构建合适的模型,利用已有的训练样本进行学习和预测,从而实现对齿轮箱故障的预测和诊断。人工智能则结合了模式识别和机器学习的方法,通过建立复杂的模型和算法,实现对齿轮箱振动数据的智能分析和预测。
结论: 齿轮箱振动数据分析是齿轮设计和故障诊断的重要环节。通过对振动数据的采集、预处理、特征提取和故障诊断等步骤,可以有效地提取和分析齿轮箱振动数据中的有用信息,为齿轮设计和故障诊断提供有力的支持。未来,随着科学技术的不断发展,齿轮箱振动数据分析的算法流程也将不断完善和优化,为齿轮设计和故障诊断带来更加精确和可靠的结果。
📣 部分代码
clear all;
close all;
figure;
plot(abs(fft(signal(1,:))),1024);
%时域特征计算----结果显示在命令框
for i=1:1:4
feature(i,1)=var(signalnew(i,:)); %特征1 方差
feature(i,2)=skewness(signalnew(i,:)); %特征2 偏度
feature(i,3)=kurtosis(signalnew(i,:)); %特征3 峰度
feature(i,4)=std(signalnew(i,:)); %特征4 均方根
disp(['信号',num2str(i),'的方差、偏度、峰度、均方根分别为']); %输出
disp(feature(i,:));
end
%小波变换
percent=zeros(4,33);
for i=1:1:4
percent(i,1)=i;
c=cwt(signalnew(i,:),1:32,'morl'); %morlet小波 32维
a=zeros(32,1);
for j=1:1:32
for jj=1:1:n
a(j,1)=a(j,1)+(c(j,jj)).^2;
end
end
%计算每个尺度对应能量占总能量的百分比
sum1=0;
for j=1:1:32
sum1=sum1+a(j);
end
b=zeros(32,1);
for j=1:1:32
b(j,1)=a(j,1)./sum1;
end
b=b';
percent(i,2:1:33)=b(1,:);
figure(2);
color=[0 0 0;
0 0 1;
0 1 0;
1 0 0];
for i=1:1:4
plot(percent(i,2:33),'color',color(i,:));hold on;grid on;
end
xlabel('尺度');ylabel('各尺度能量百分比');title('齿轮振动信号能量-尺度图');
end
legend('信号1','信号2','信号3','信号4')
%功率谱计算 Welch法
nfft=128;
window=hamming(100);
noverlap=20;
figure(3);
for i=1:1:4
[Pxx,f]=pwelch(signalnew(i,:),window,noverlap,nfft,fs);
Pxx_log=10*log(Pxx);
plot(f,Pxx_log,'color',color(i,:));hold on;grid on;
end
xlabel('频率(Hz)');ylabel('幅值(dB)');title('齿轮振动信号功率谱');
legend('信号1','信号2','信号3','信号4')⛳️ 运行结果
🔗 参考文献
[1] 叶舒亚.基于FPGA的便携式振动频谱分析仪的设计[D].成都理工大学[2023-10-30].DOI:CNKI:CDMD:2.2007.142751.
[2] 刘俊,杨俊华,杨梦丽,等.基于MATLAB与VC的风电机组齿轮箱振动信号采集与分析系统[J].广东电力, 2013, 26(6):7.DOI:10.3969/j.issn.1007-290X.2013.06.015.
[3] 李俊伟房建东.基于MATLAB的齿轮箱加速度信号模糊识别传感器系统分析设计[J].电子设计工程, 2017, 025(012):37-40.