
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
🔥 内容介绍
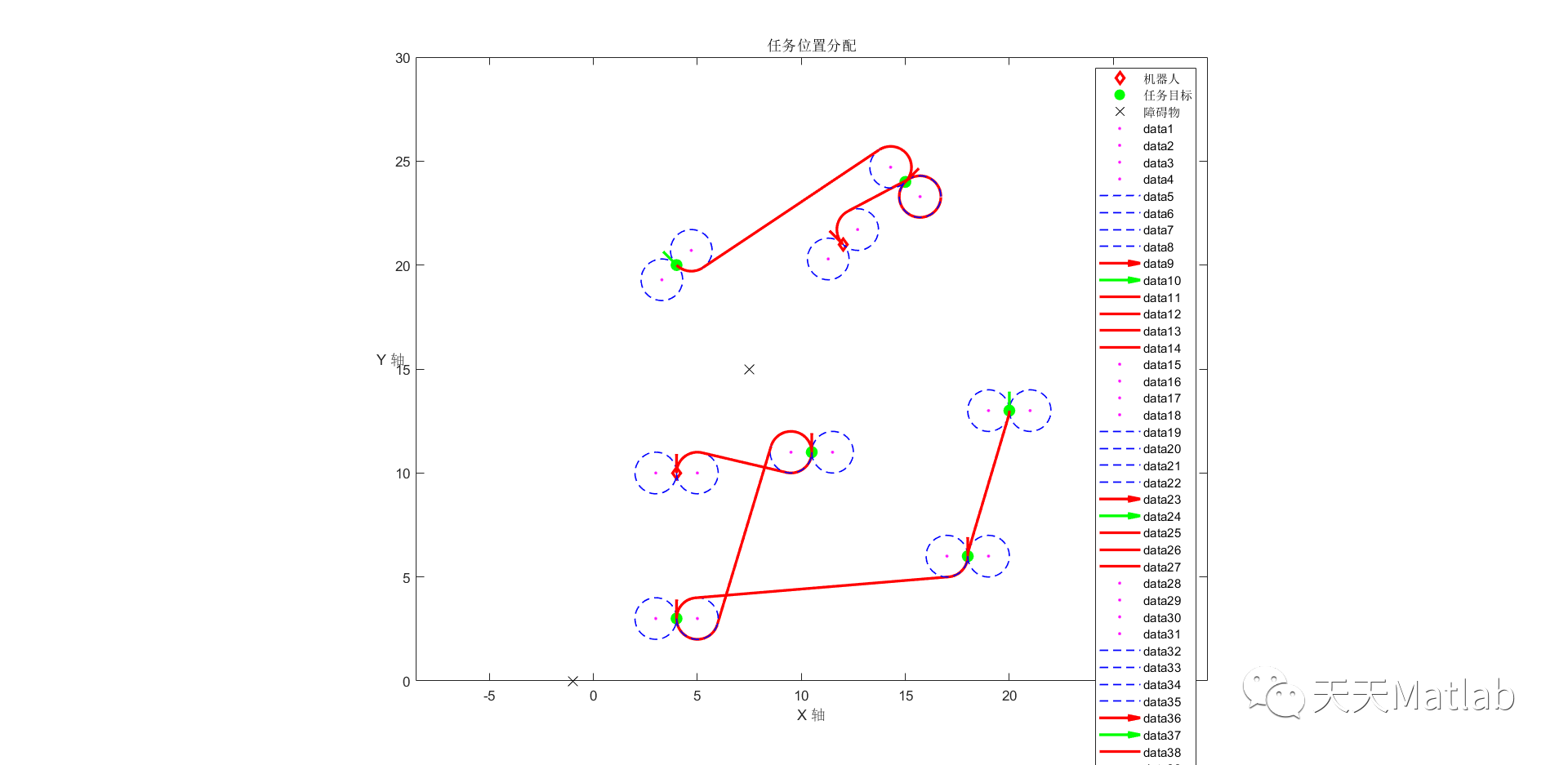
在当今的自动化和智能化时代,机器人的应用范围越来越广泛。机器人能够执行各种任务,从工业生产到服务业,从医疗保健到农业。然而,随着任务的增加和复杂性的提高,如何高效地分配任务和规划机器人的路径成为一个关键的问题。在本文中,我们将介绍一种基于Dubins算法的机器人多任务分配及路径规划算法流程。
Dubins算法是一种用于规划机器人路径的算法,它通过考虑机器人的运动约束和环境的限制来找到最佳路径。Dubins算法的核心思想是将机器人的运动模型建模为Dubins曲线,这是一种特殊类型的曲线,由直线段和圆弧段组成。Dubins算法通过在机器人的初始位置和目标位置之间搜索Dubins曲线,找到一条最短路径。
在多任务分配和路径规划问题中,我们需要考虑多个任务和多个机器人之间的关系。首先,我们需要确定每个任务的优先级和约束条件。然后,我们需要将任务分配给可用的机器人,并规划每个机器人的路径。最后,我们需要考虑机器人之间的协作和冲突解决。
算法流程如下:
- 输入任务列表和机器人列表。
- 为每个任务和机器人分配唯一的标识符。
- 根据任务的优先级和约束条件,将任务按照优先级从高到低排序。
- 遍历任务列表,为每个任务选择最佳的机器人。可以使用贪心算法或其他启发式算法来进行任务分配。
- 对于每个任务,使用Dubins算法规划机器人的路径。首先,确定机器人的起始位置和目标位置。然后,使用Dubins算法找到最佳路径。
- 如果有多个机器人同时执行任务,则需要考虑机器人之间的协作和冲突解决。可以使用协调算法来解决机器人之间的冲突。
- 输出任务分配和路径规划结果。
通过使用基于Dubins算法的机器人多任务分配及路径规划算法流程,我们可以高效地分配任务并规划机器人的路径。这种算法可以应用于各种领域,如工业自动化、物流和交通管理等。它能够提高任务执行的效率和准确性,同时减少机器人之间的冲突和碰撞。
总结起来,机器人多任务分配及路径规划是一个复杂而关键的问题。通过使用Dubins算法,我们可以找到最佳路径并高效地分配任务。这种算法可以应用于各种实际场景,并为自动化和智能化领域的发展做出贡献。希望本文的介绍能够对机器人多任务分配及路径规划算法的研究和实践有所帮助。
📣 部分代码
function [xa,ya,xb,yb] = dubinsCalculateFunction(R,x0,y0,phi1,a0,b0,theta1)
phi0=phi1/pi*180;
x=x0+R*cos((phi0+90)/57.3); %逆时针圆圆心--起始圆
y=y0+R*sin((phi0+90)/57.3);
x1=x0+R*cos((phi0-90)/57.3); %顺时针圆圆心--起始圆
y1=y0+R*sin((phi0-90)/57.3);
theta0=theta1/pi*180;
a=a0+R*cos((theta0+90)/57.3); %逆时针圆圆心--终止圆
b=b0+R*sin((theta0+90)/57.3);
a1=a0+R*cos((theta0-90)/57.3); %顺时针圆圆心--终止圆
b1=b0+R*sin((theta0-90)/57.3);
%圆心距
L1=sqrt((x-a)*(x-a)+(y-b)*(y-b));
L2=sqrt((x-a1)*(x-a1)+(y-b1)*(y-b1));
L3=sqrt((x1-a)*(x1-a)+(y1-b)*(y1-b));
L4=sqrt((x1-a1)*(x1-a1)+(y1-b1)*(y1-b1));
[Lmin,index] = min([L1 L2 L3 L4]);
switch index
case 1%x,y a,b 起始圆逆终止圆逆
%左对左
% alpa=pi/2+atan(R/L1);
alpa=pi/2;
F=[a;b]+[cos(alpa) -sin(alpa);sin(alpa) cos(alpa)]*[x-a;y-b]*R/L1;
xb=F(1); %切点坐标
yb=F(2);
alpa=alpa+pi;
I=[x;y]+[cos(alpa) -sin(alpa);sin(alpa) cos(alpa)]*[a-x;b-y]*R/L1;
xa=I(1); %起点坐标
ya=I(2);
case 2%x,y a1,b1 起始圆逆终止圆顺
%左对右
% alpa=-pi/2+atan(2*R/L2);
alpa=-(pi/2-asin(2*R/L2));
F=[a1;b1]+[cos(alpa) -sin(alpa);sin(alpa) cos(alpa)]*[x-a1;y-b1]*R/L2;
xb=F(1); %切点坐标
yb=F(2);
I=[x;y]+[cos(alpa) -sin(alpa);sin(alpa) cos(alpa)]*[a1-x;b1-y]*R/L2;
xa=I(1); %起点坐标
ya=I(2);
case 3%x1,y1 a,b 起始圆逆终止圆顺
%右对左
% alpa=pi/2-atan(2*R/L1);
alpa=pi/2-asin(2*R/L3);
F=[a;b]+[cos(alpa) -sin(alpa);sin(alpa) cos(alpa)]*[x1-a;y1-b]*R/L3;
xb=F(1); %切点坐标
yb=F(2);
I=[x1;y1]+[cos(alpa) -sin(alpa);sin(alpa) cos(alpa)]*[a-x1;b-y1]*R/L3;
xa=I(1); %起点坐标
ya=I(2);
case 4%x1,y1 a1,b1 起始圆顺终止圆顺
%右对右
% alpa=-pi/2+atan(R/L4);
alpa=-pi/2;
F=[a1;b1]+[cos(alpa) -sin(alpa);sin(alpa) cos(alpa)]*[x1-a1;y1-b1]*R/L4;
xb=F(1); %切点坐标
yb=F(2);
alpa=alpa+pi;
I=[x1;y1]+[cos(alpa) -sin(alpa);sin(alpa) cos(alpa)]*[a1-x1;b1-y1]*R/L4;
xa=I(1); %起点坐标
ya=I(2);
otherwise
error('异常')
end
end⛳️ 运行结果
🔗 参考文献
[1] 张兰勇,韩宇.基于改进的RRT*算法的AUV集群路径规划[J].中国舰船研究, 2023, 18(1):9.DOI:10.19693/j.issn.1673-3185.02879.
[2] 齐剑.基于音乐墙的多机器人路径规划研究[D].安徽理工大学,2017.DOI:10.7666/d.Y3236505.
[3] 唐博健.多移动式喷砂机器人任务分配及路径规划研究[D].天津理工大学[2023-11-03].
[4] 单芳.基于改进蚁群算法的机器人路径规划研究[D].天津财经大学[2023-11-03].DOI:CNKI:CDMD:2.2006.071966.