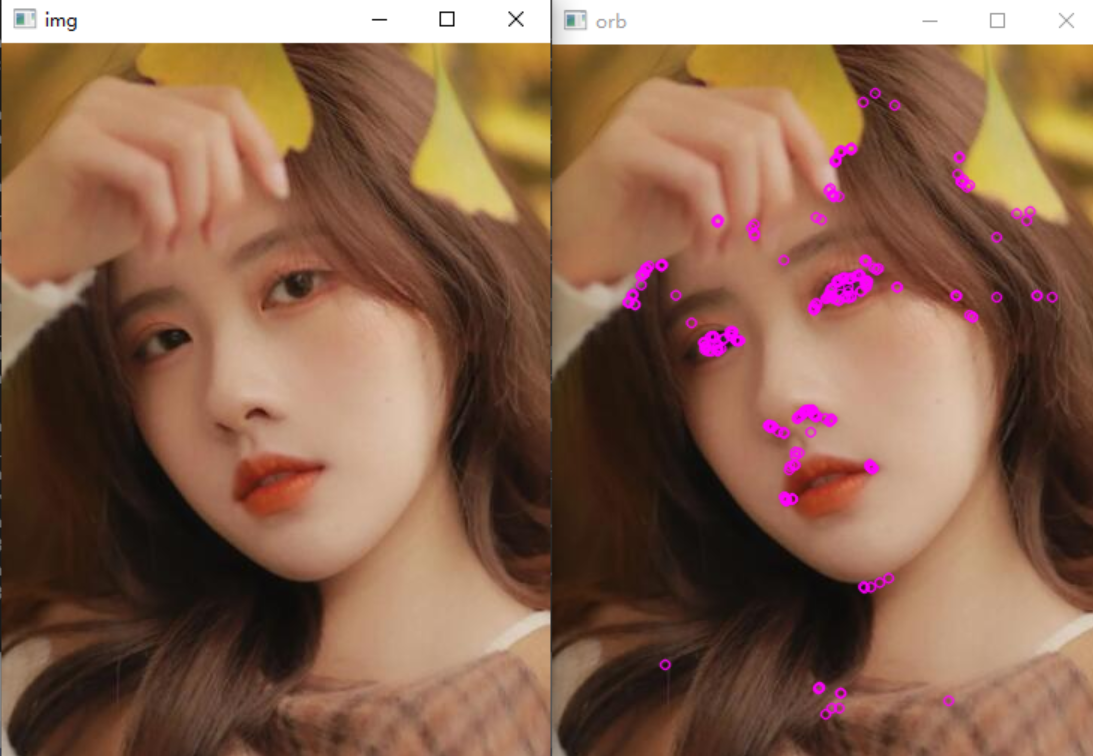
ORB在2011年才首次发布,ORB算法将基于FAST关键点的技术和基于BRIEF描述符的技术相结合,但是ORB并没有解决尺度不一致的问题,在OpenCV的ORB实现中采用了图像金字塔来改善这方面的性能,我们通过构建高斯金字塔,然后在每一层金字塔图像上检测角点,来实现尺度不变性。ORB主要解决了BRIEF描述子不具备旋转不变性的问题。 BRIEF是一种特征描述子提取算法,并非特征点的提取算法,一种生成二值化描述子的算法,不提取代价低,匹配只需要使用简单的汉明距离(Hamming Distance)利用比特之间的异或操作就可以完成。因此,时间代价低,空间代价低,效果还挺好是最大的优点。
ORB算法大致流程
- 建立图像金字塔
- FAST算法寻找特征点
- 给关键点分配方向
- 通过BRIEF算法创建特征向量,得到特征描述符
API介绍
static Ptr<ORB> create(int nfeatures=500, float scaleFactor=1.2f, int nlevels=8, int edgeThreshold=31,int firstLevel=0, int WTA_K=2, ORB::ScoreType scoreType=ORB::HARRIS_SCORE, int patchSize=31, int fastThreshold=20);
/*******************************************************************
* nfeatures: 保留的最佳特性的数量
* scaleFactor: 金字塔抽取率,必须大于1
* nlevels: 金字塔等级的数量
* edgeThreshold: 边缘阈值
* firstLevel: 第一层的索引值
* WTA_K: 用于生成定向的BRIEF描述符的每个元素的随机像素的数量
* 2:一次选择两个随机像素比较,匹配的时候距离参数选择NORM_HAMMING,默认方式
* 3:一次选择三个随机像素来比较它们的亮度,返回最亮像素的索引,返回回的索引将为0,1或2
* 4:一次选择四个随机像素来比较它们的亮度,返回最亮像素的索引,回的索引将为0,1,2或3
* scoreType: 对特征点进行排序的算法
* HARRIS_SCORE:Harris角算法用于对要素进行排名。该分数仅用于保留最佳功能
* FAST_SCORE: 速度快,关键点稍差
* patchSize: 用于计算BIREF描述子的特征点邻域大小
* fastThreshold: fast特征阈值
*********************************************************************/
virtual void detect( InputArray image,std::vector<KeyPoint>& keypoints,InputArray mask=noArray());
/*******************************************************************
* image: 输入图
* keypoints: 角点信息
* mask: 计算亚像素角点区域大小
*********************************************************************/
void drawKeypoints( InputArray image, const std::vector<KeyPoint>& keypoints, InputOutputArray outImage,const Scalar& color=Scalar::all(-1), DrawMatchesFlags flags=DrawMatchesFlags::DEFAULT );
/*******************************************************************
* image: 输入图
* keypoints: 角点信息
* outImage: 计算亚像素角点区域大小
* color: 颜色
* flags: 绘制匹配标记
*********************************************************************/综合代码
#include <iostream>
#include <map>
#include <new>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
class ORBFeature
{
public:
ORBFeature() :img(imread("mm.jpg"))
{
result["img"] = img;
}
void TestORB()
{
Ptr<ORB> orb = ORB::create();
orb->detect(img, point);
drawKeypoints(img, point, result["orb"], Scalar(255, 0, 255));
}
void Show()
{
for (auto& v : result)
{
imshow(v.first, v.second);
}
waitKey(0);
}
protected:
Mat img;
vector<KeyPoint> point;
map<string, Mat> result;
};
int main()
{
unique_ptr<ORBFeature> p(new ORBFeature);
p->TestORB();
p->Show();
return 0;
}
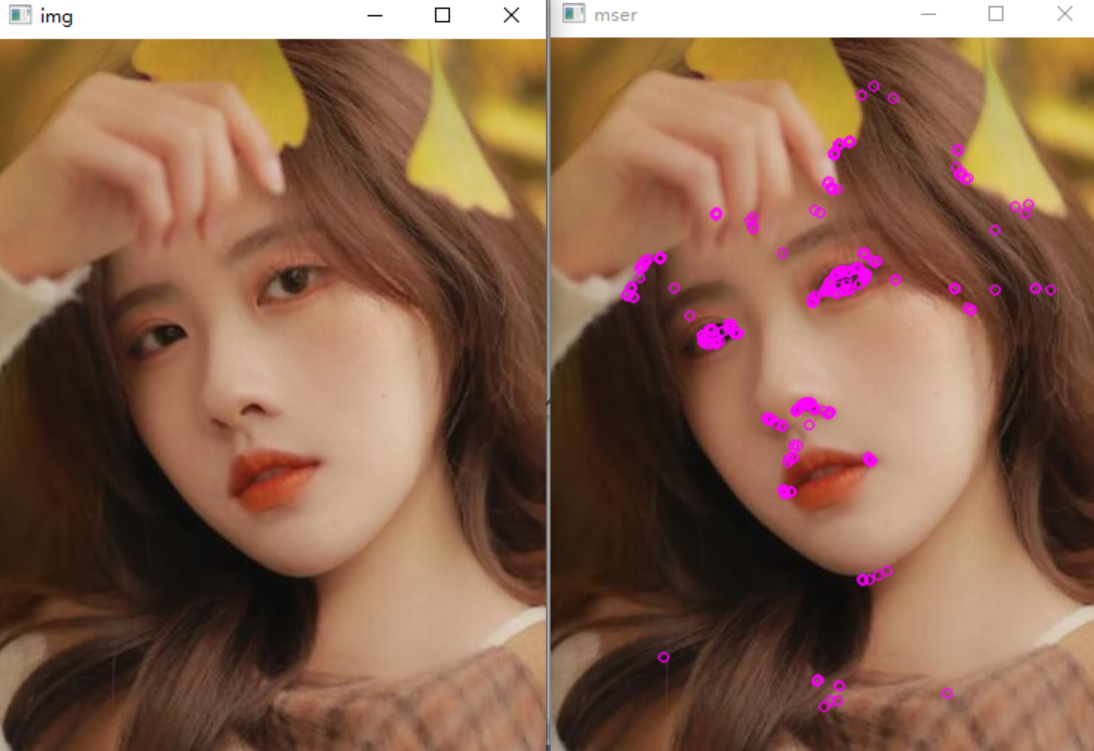
OpenCV SER特征检测
MSER是极值区域检测算法,MSER类根据输入参数判断是否为彩色or灰度图像进行不同的算法检测。若输入为灰度图像,那么采取MSER极值区域检测算法,若输入为彩色图像,则采用MSCR极值区域检测算法,可以用于图像的斑点区域检测。业界认为是性能最好的仿射不变区域,MSER是当使用不同的灰度阈值对图像进行二值化时得到的最稳定的区域,特点:
- 对于图像灰度的仿射变化具有不变性
- 稳定性,区域的支持集相对灰度变化稳定
- 可以检测不同精细程度的区域
MSER算法大致流程
- 使用一系列灰度阈值对图像进行二值化处理
- 对于每个阈值得到的二值图像,得到相应的黑色区域与白色区域
- 在比较宽的灰度阈值范围内保持形状稳定的区域就是MSER特征
- 评判标准:
dA/dt,A: 二值图像区域面积,t: 灰度
API介绍
static Ptr<MSER> create( int delta=5, int min_area=60, int max_area=14400,double max_variation=0.25, double min_diversity=.2,int max_evolution=200, double area_threshold=1.01,double min_margin=0.003, int edge_blur_size=5 );
/*******************************************************************
* delta: 两个区域间的灰度差
* min_area: 剔除小于此值的区域
* max_area: 剔除大于此值的区域
* max_variation: 剔除灰度值变化时,区域变化为此倍数的区域
* min_diversity: 当前区域与稳定区域的变化率
* max_evolution: 位置变化步长
* area_threshold: 重新初始化的面积阈值
* min_margin: 最小边缘尺寸
* edge_blur_size: 边缘滤波的孔径尺寸
*********************************************************************/
virtual void detect( InputArray image,std::vector<KeyPoint>& keypoints,InputArray mask=noArray());
/*******************************************************************
* image: 输入图
* keypoints: 角点信息
* mask: 计算亚像素角点区域大小
*********************************************************************/
void drawKeypoints( InputArray image, const std::vector<KeyPoint>& keypoints, InputOutputArray outImage,const Scalar& color=Scalar::all(-1), DrawMatchesFlags flags=DrawMatchesFlags::DEFAULT );
/*******************************************************************
* image: 输入图
* keypoints: 角点信息
* outImage: 计算亚像素角点区域大小
* color: 颜色
* flags: 绘制匹配标记
*********************************************************************/综合代码
#include <iostream>
#include <map>
#include <new>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
class MSERFeature
{
public:
MSERFeature() :img(imread("mm.jpg"))
{
result["img"] = img;
}
void TestMSER()
{
Ptr<ORB> mser = ORB::create();
mser->detect(img, point);
drawKeypoints(img, point, result["mser"], Scalar(255, 0, 255));
}
void Show()
{
for (auto& v : result)
{
imshow(v.first, v.second);
}
waitKey(0);
}
protected:
Mat img;
vector<KeyPoint> point;
map<string, Mat> result;
};
int main()
{
unique_ptr<MSERFeature> p(new MSERFeature);
p->TestMSER();
p->Show();
return 0;
}
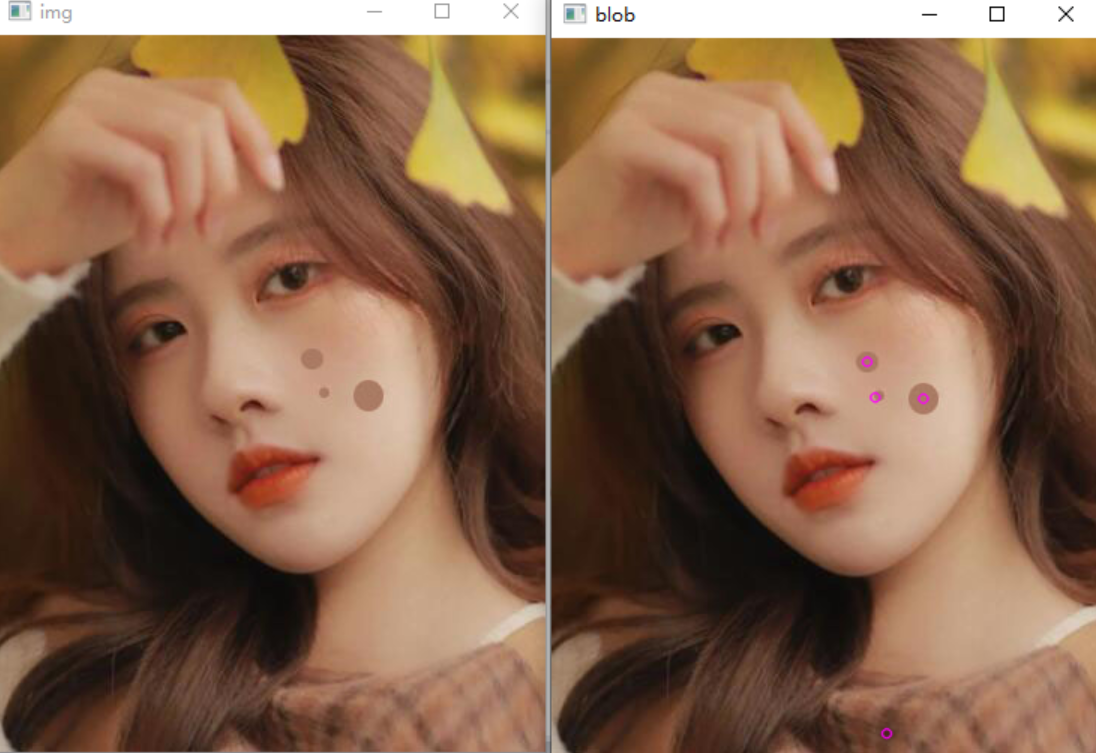
OpenCV SimpleBlob特征检测
SimpleBlob是检测斑点类的特征点,斑点本质其实是一组连通的像素在图像中共享一些共同的属性(如灰度值、颜色等)
SimpleBlob检测大致流程
- 图像分割(例如阈值化操作)
- 连通性分析
- 特征量计算
API介绍
static Ptr<SimpleBlobDetector>create(const SimpleBlobDetector::Params ¶meters = SimpleBlobDetector::Params());
/*******************************************************************
* parameters: Params结构体
* SimpleBlobDetector::Params params;
* 阈值控制
* params.minThreshold = 10;
* params.maxThreshold = 200;
* 像素面积大小控制
* params.filterByArea = true;
* params.minArea = 1000;
* 形状(凸)
* params.filterByCircularity = false;
* params.minCircularity = 0.7;
* 形状(凹)
* params.filterByConvexity = true;
* params.minConvexity = 0.9;
* 形状(圆)
* params.filterByInertia = false;
* params.minInertiaRatio = 0.5;
*********************************************************************/
virtual void detect( InputArray image,std::vector<KeyPoint>& keypoints,InputArray mask=noArray());
/*******************************************************************
* image: 输入图
* keypoints: 角点信息
* mask: 计算亚像素角点区域大小
*********************************************************************/
void drawKeypoints( InputArray image, const std::vector<KeyPoint>& keypoints, InputOutputArray outImage,const Scalar& color=Scalar::all(-1), DrawMatchesFlags flags=DrawMatchesFlags::DEFAULT );
/*******************************************************************
* image: 输入图
* keypoints: 角点信息
* outImage: 计算亚像素角点区域大小
* color: 颜色
* flags: 绘制匹配标记
*********************************************************************/综合代码
#include <iostream>
#include <map>
#include <new>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
class BLOBFeature
{
public:
BLOBFeature() :img(imread("mm.jpg"))
{
result["img"] = img;
}
void TestBLOB()
{
SimpleBlobDetector::Params params;
params.minThreshold = 1;
params.maxThreshold = 200;
params.filterByArea = true;
params.minArea = 10;
params.filterByCircularity = true;
params.minCircularity = 0.7;
params.filterByConvexity = true;
params.minConvexity = 0.9;
params.filterByInertia = true;
params.minInertiaRatio = 0.5;
Ptr<SimpleBlobDetector> blob = SimpleBlobDetector::create(params);
blob->detect(img, point);
drawKeypoints(img, point, result["blob"], Scalar(255, 0, 255));
}
void Show()
{
for (auto& v : result)
{
imshow(v.first, v.second);
}
waitKey(0);
}
protected:
Mat img;
vector<KeyPoint> point;
map<string, Mat> result;
};
int main()
{
unique_ptr<BLOBFeature> p(new BLOBFeature);
p->TestBLOB();
p->Show();
return 0;
}